This articles discusses features introduced in Giro3D 0.37.
Giro3D 0.37 introduced support for point cloud classification and intensity.
Point cloud classifications
After acquisition by a LIDAR sensor, each point can be associated with a class (or classification) determining its nature: ground, vegetation, buildings, etc.
Points can then be manipulated and processed according to their classification (filtering, coloring, etc).
Which point data format support classifications ?
Many formats support this feature. In open-source web, the main formats are the following:
Display classifications in Giro3D
See the full example on the Giro3D website.
Currently, Giro3D supports classification through the Tiles3D entity, enabling the display of point cloud data after conversion to the 3D Tiles format.
Support for the COPC format is currently being implemented, and will also support classifications. The roadmap also plans adding support for the new Potree 2.0 file format.
Selecting color and visibility
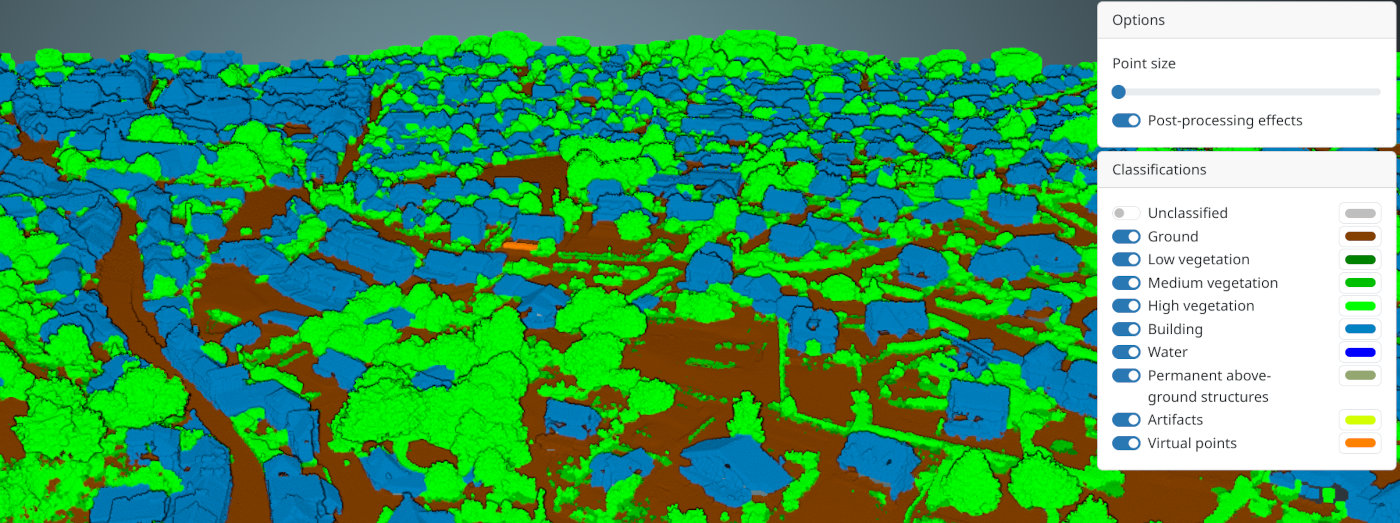
Each classification is made of a color and a visibility. By default, all classifications are visible. Classes 0 to 18 have pre-defined colors (following the ASPRS classification list.), but they can be freely modified.
In the classification example, it is possible to modify the color and visiblity of each classification dynamically. The scene is updated in real time.
Classified point clouds
Intensities
See the full example on the Giro3D website.
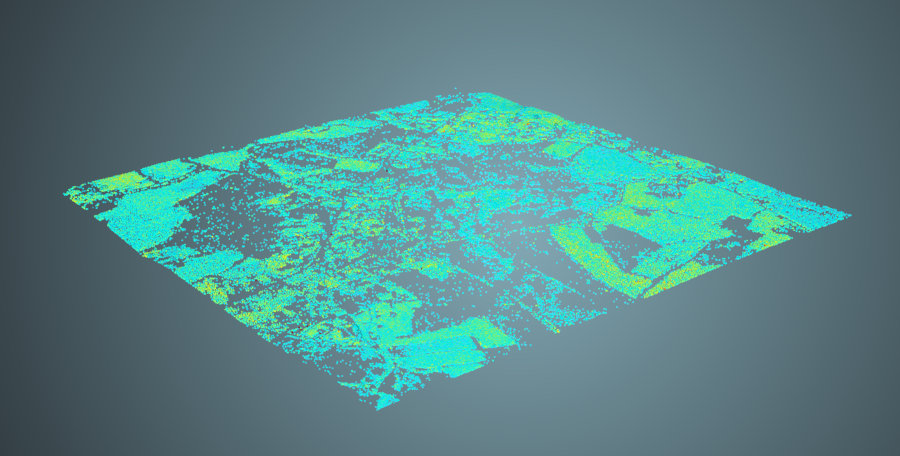
The intensity of a point is a numerical value describing the quantity of energie reflected by the surface (and conversely the quantity of energy absorbed by the surface). In a typical LIDAR scene, trees absorb more laser energy than the surrounding fields for example, which give them a lower intensity value.
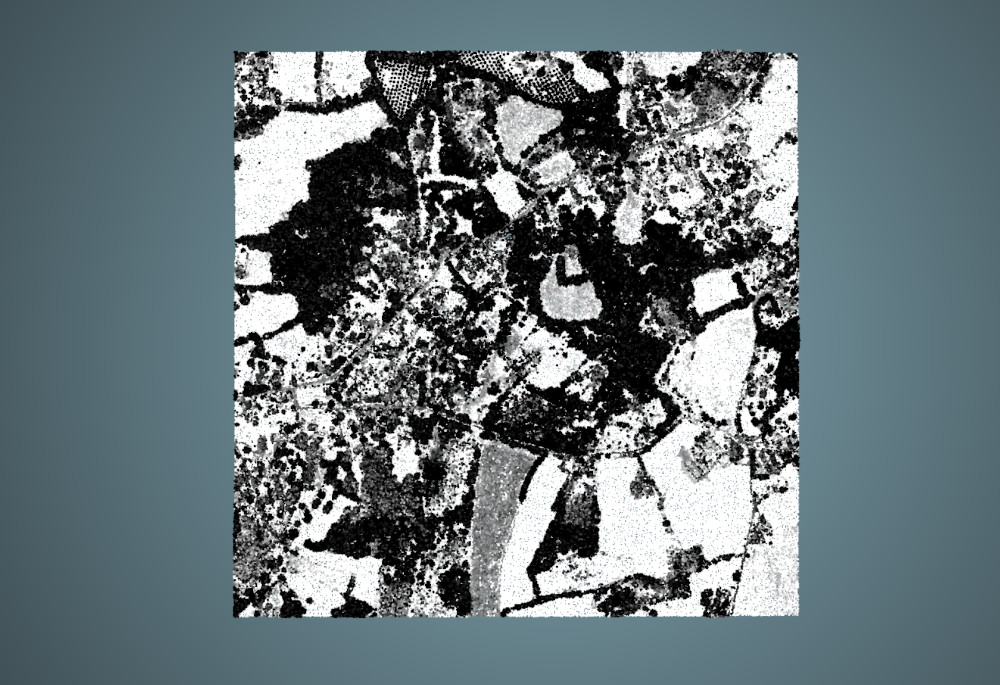
Intensity of fields is greater than those of trees
In Giro3D, interpretation of the intensity values goes through a color ramp (ColorMap).
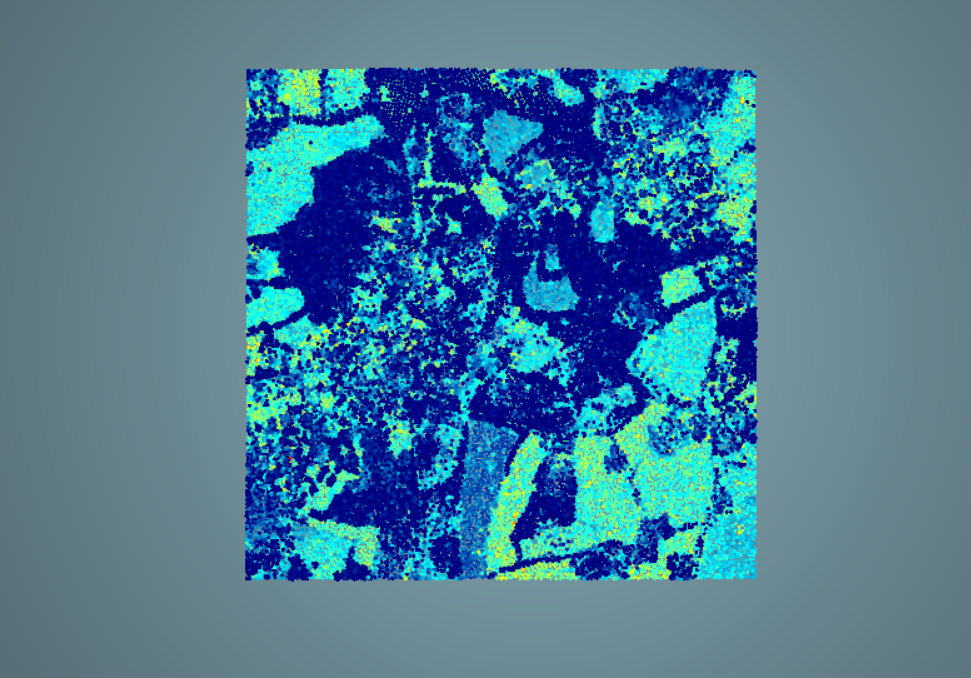
The same point cloud with a different color map.
Variable opacities
Giro3D color ramps support variable opacities. Each color in the color ramp can also be associated to an opacity value (from 0 to 1), indicating the degree of transparency of this color.
This makes it possible for example to make some intensity fully or semi-transparent, such as trees:
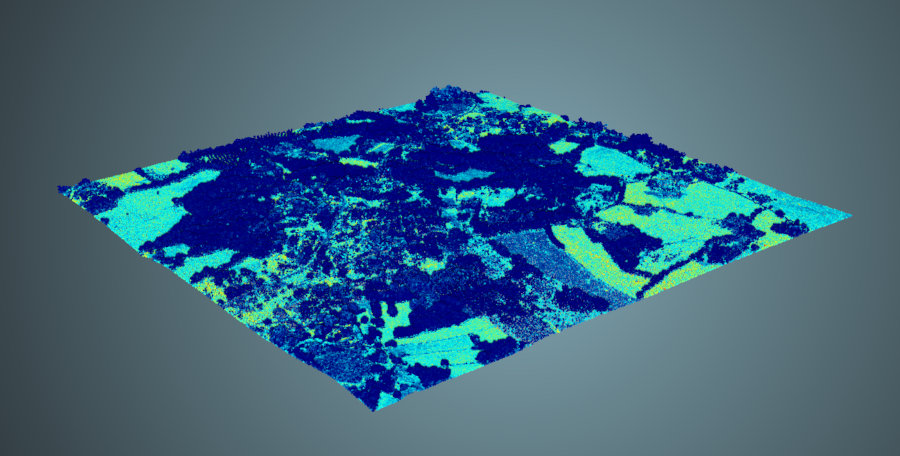
The default point cloud
Intensities lower than a specific threshold have an opacity of zero, thus masking the trees.

