
Giro3D is a geospatial data visualization library for the Web. Free and open source, it is compatible with numerous geospatial data sources (rasters, vectors, point clouds…).
👉 See the complete list of changes for version 0.41.
LAS Point Cloud Support
Giro3D 0.41 introduces the highly anticipated support for point clouds in the LAS format. This includes:
- Simple LAS/LAZ files
- COPC-optimized LAS files
- Potree point clouds in LAZ format
The New PointCloud Entity
These point clouds are displayed using the new PointCloud entity, which can be connected to multiple data sources:
- LASSource for non-hierarchical LAS files
- COPCSource for COPC-optimized LAS files
- PotreeSource for Potree datasets
- AggregatePointCloudSource for combining multiple sources into one (see below)
It is also easy to implement new sources for point cloud formats such as XYZ or Entwine EPT…
The COPC Format
The COPC format (Cloud Optimized Point Cloud) allows loading a remote LAS file optimized for web streaming. The points are structured using an octree spatial index, creating a virtual hierarchy of point groups that Giro3D fetches on demand.
The benefits of the COPC format are numerous:
- A single file can serve millions or even tens of millions of points.
- Since a COPC file is a standard LAS file, it can be read by all applications compatible with LAS files, even if they don't support the hierarchical optimizations provided by COPC.
- Compatible with all variants of the LAS specification (Point Data Record).
- Can store all point cloud attributes: color, intensity, classification, number of returns…
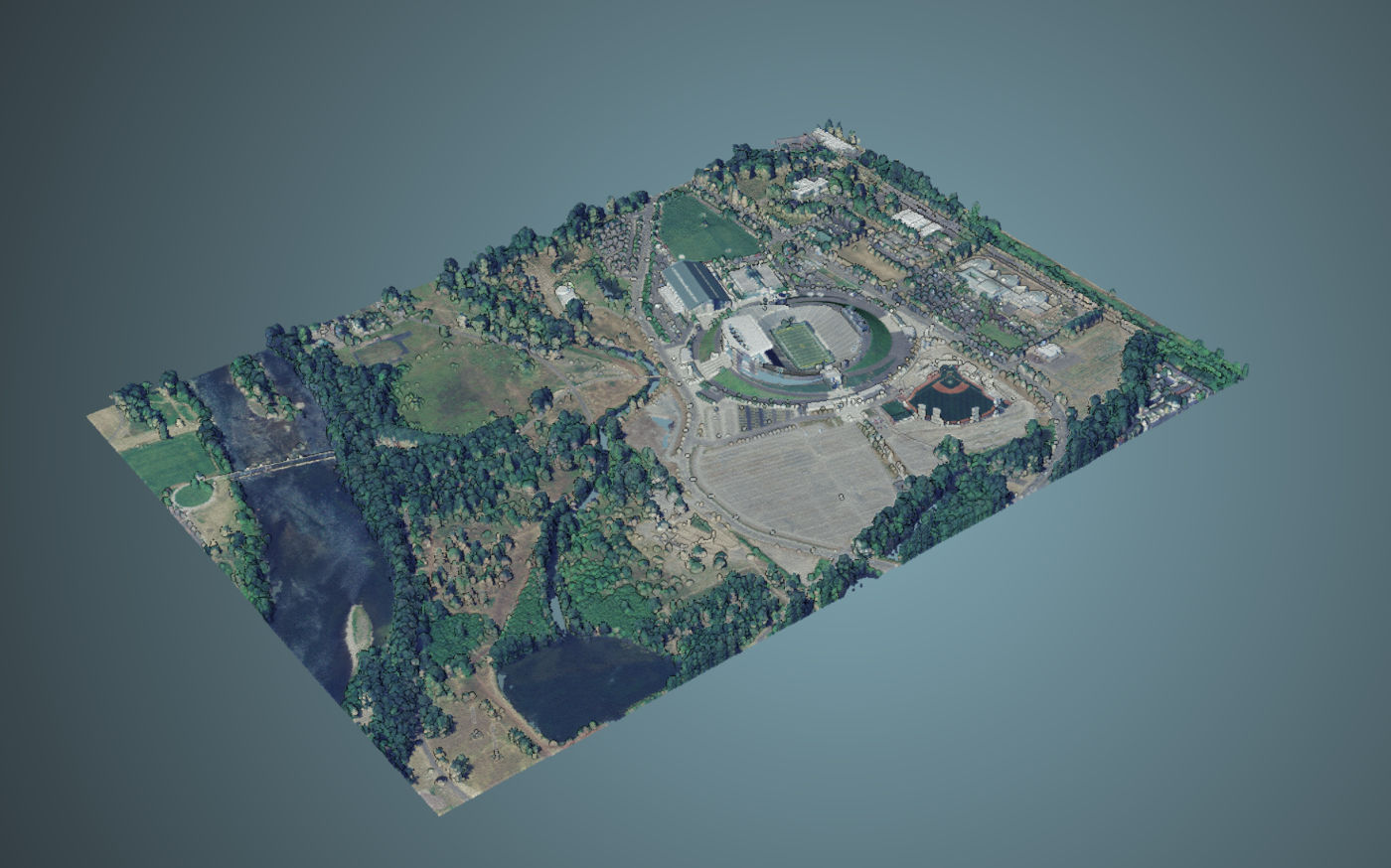
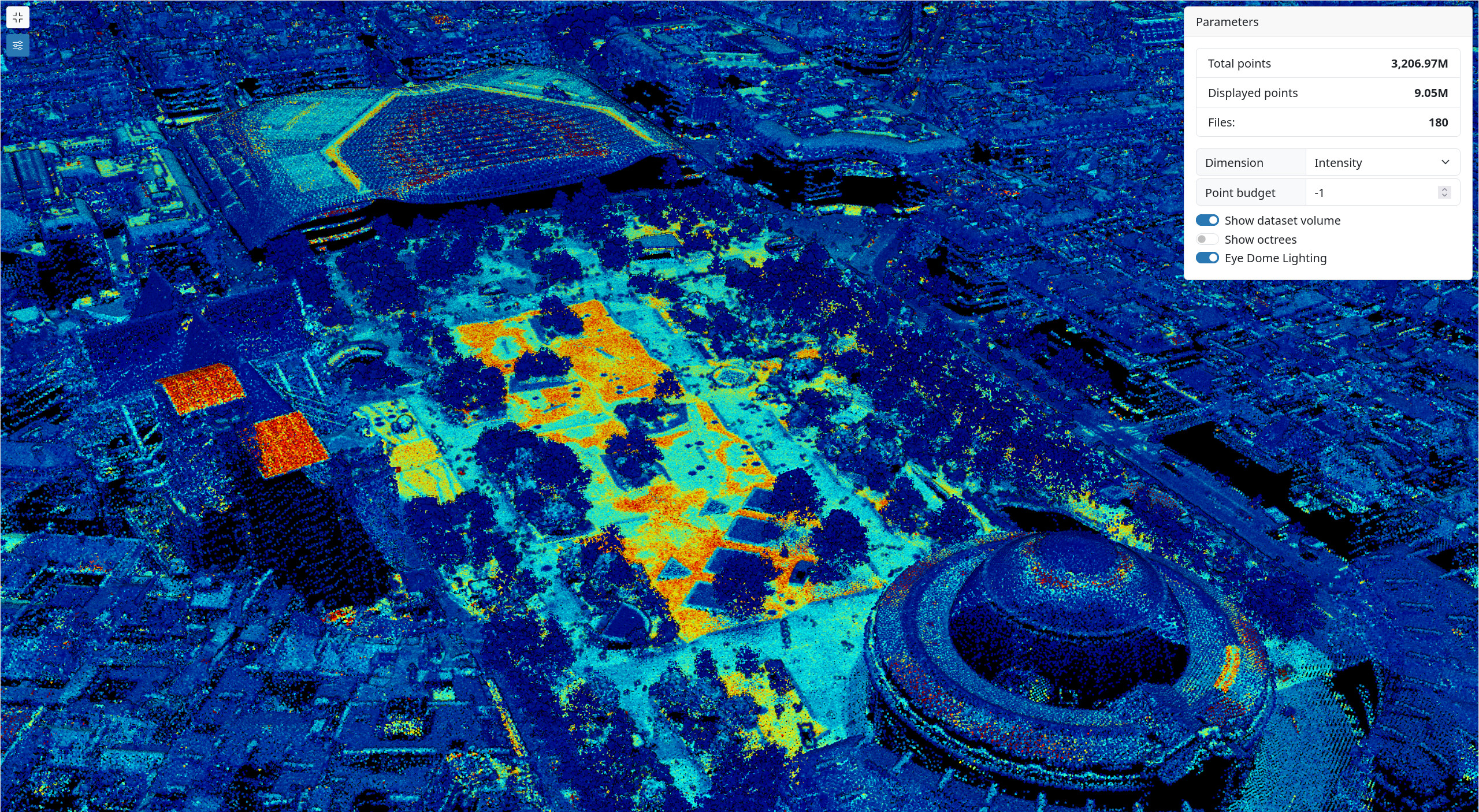
3 Billion Points Displayed in Giro3D
To showcase the power of the COPC format and its implementation in Giro3D, visit the following example: https://giro3d.org/latest/examples/aggregate_pointcloud.html.
This example combines 180 COPC files provided by the IGN's LIDAR HD program, totaling over 3 billion points. These files are grouped within an AggregatePointCloudSource, providing a unified interface to all underlying sources (COPC or others).
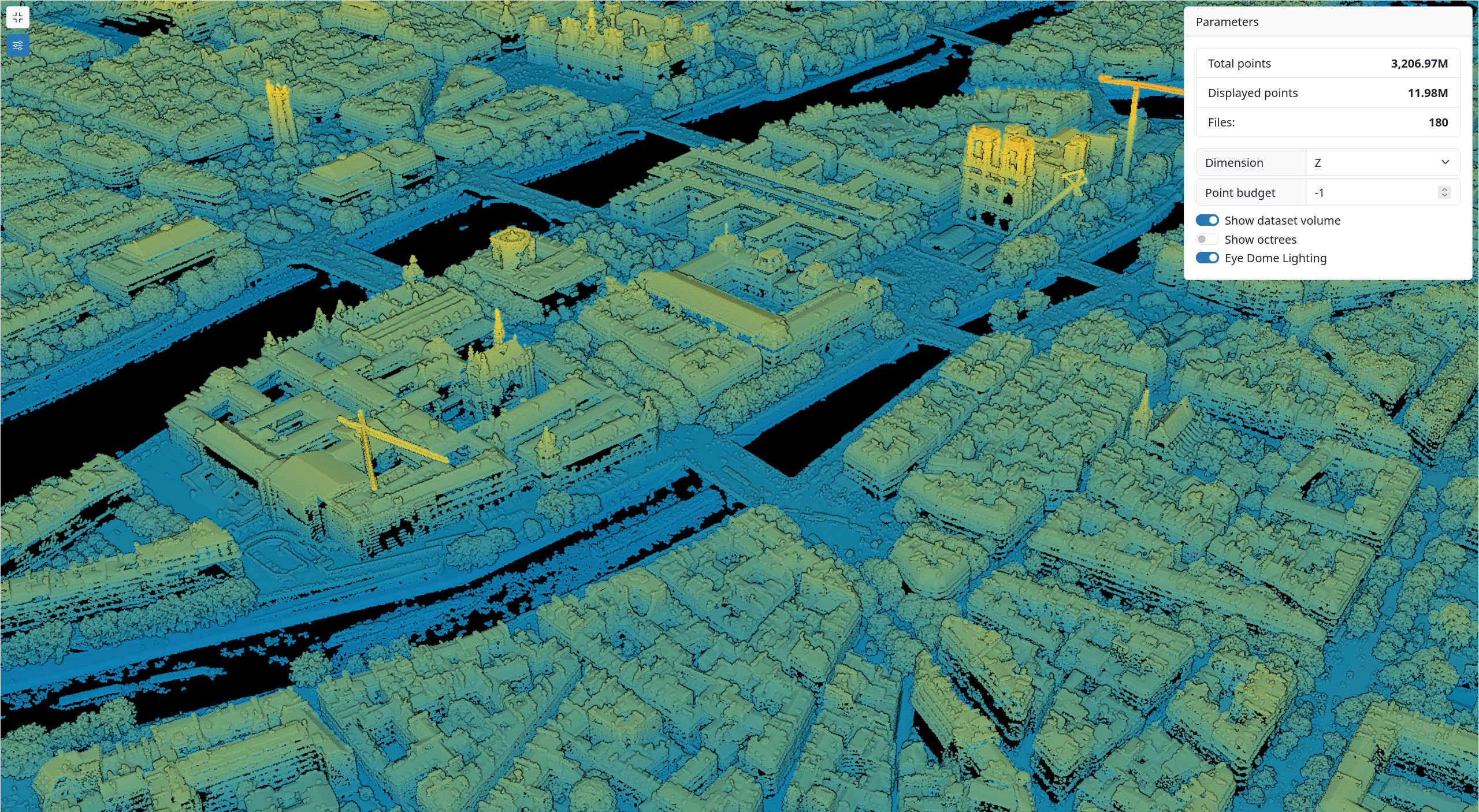
Point Cloud Filters
The LASSource and COPCSource provide a feature for filtering points by criteria. These criteria apply to the existing attributes in the data source (intensity, classification, color, elevation…).
In this illustration, only points meeting the following criteria are displayed:
- Elevation (Z) is greater than zero
- Classification equals 2 (representing vegetation)
- The number of LIDAR returns is greater than 1
👉 See this interactive example for a summary of all the LAS point cloud features in Giro3D.
![(Fr) [Equipe Oslandia] Sophie Aubier, développeuse SIG](https://oslandia.com/wp-content/uploads/2024/11/portrait-sophie-aubier.png)

